|
Sparrow / NmG
Wiki |
Sparrow /
ElithionCabinThrottleThe DCP motor controller uses a Linear Variable Inductor (LVI) to detect the throttle position (instead of the more common throttle pot). This is a much more reliable solution. Normally, the throttle LVI is mounted under the hood, by the brake fluid reservoir. In this conversion, that area is needed for cells, so the LVI has to be moved to inside the cabin. Prepare bracketsPrepare a bracket to hold the throttle.   Throttle bracket Mount throttle* Insert the plunger in the throttle sensor, with the spring between the pedal arm and the sensor * Mount the bracket to the 2 bolts that hold the brake's master cylinder  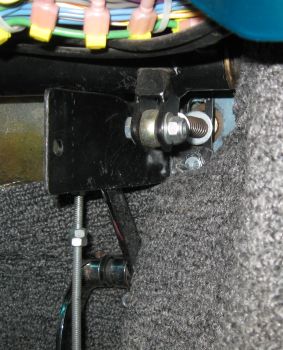 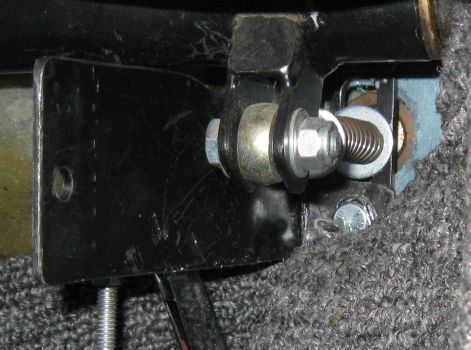 Mount throttle bracket Mount the throttle sensor to the bracket, using a lock nut so that the throttle sensor is slight free to move as the plunger goes in and out of it. 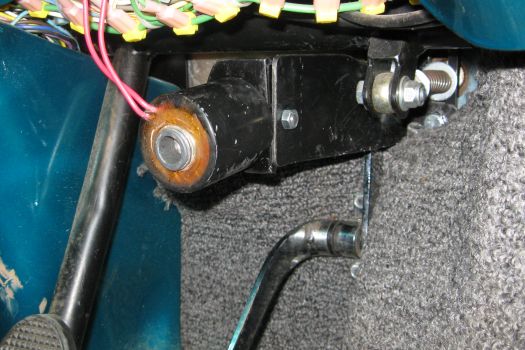  Mount throttle sensor. BMS controllerThe BMS controller is quite small. It is installed in the triangular panel to the right of the BRB.   Cut a rectangular hole in the panel. Route the BMS cables to that location 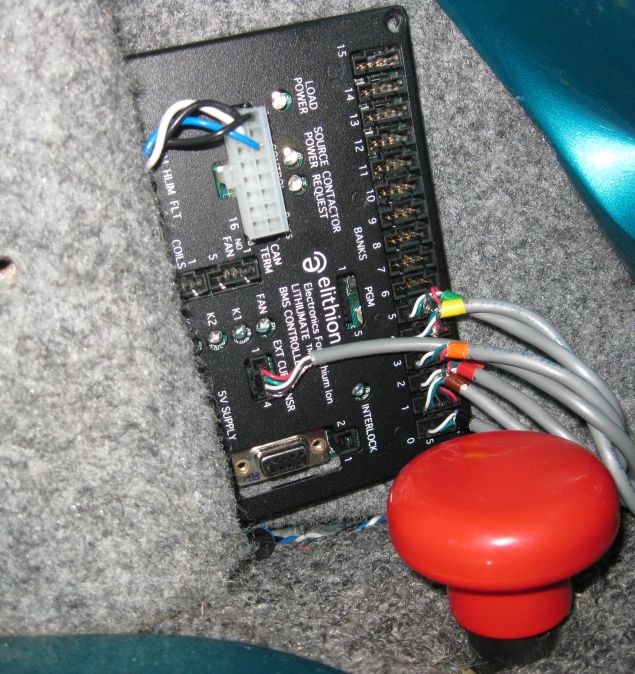 Install the BMS controller |